The BigRedLiDAR Dataset focuses on semantic understanding of indoor scenes. In the following, we give an overview on the design choices that were made to target the dataset’s focus.
Features
Type of annotations
- Semantic
- Dense point annotations
Complexity
- Multiple levels of perception compexity
Diversity
- 6 indoor scenes at Cornell University across the campus
- Automatically labeled frames
- Different level of complexity in terms of the scene and number of people
- Simple: Open spaces
- Medium: Small room indoor scenes
- Complex: Large room indoor scenes
Volume
- 28, 000 annotated point cloud frames with fine annotations examples
Metadata
- Preceding and trailing point cloud frames
- Corresponding three dimentional coordinates of each point
Annotation Samples
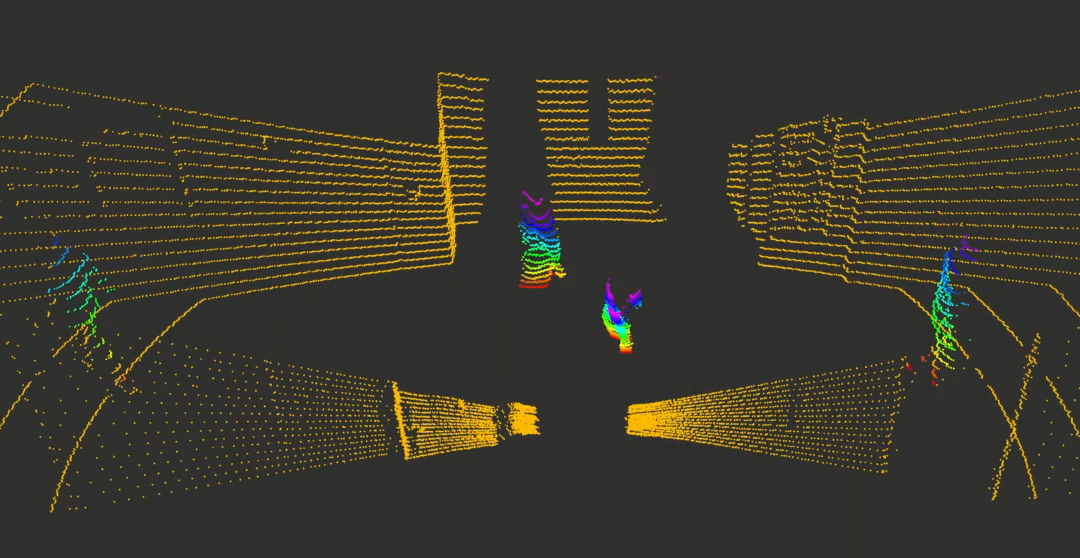
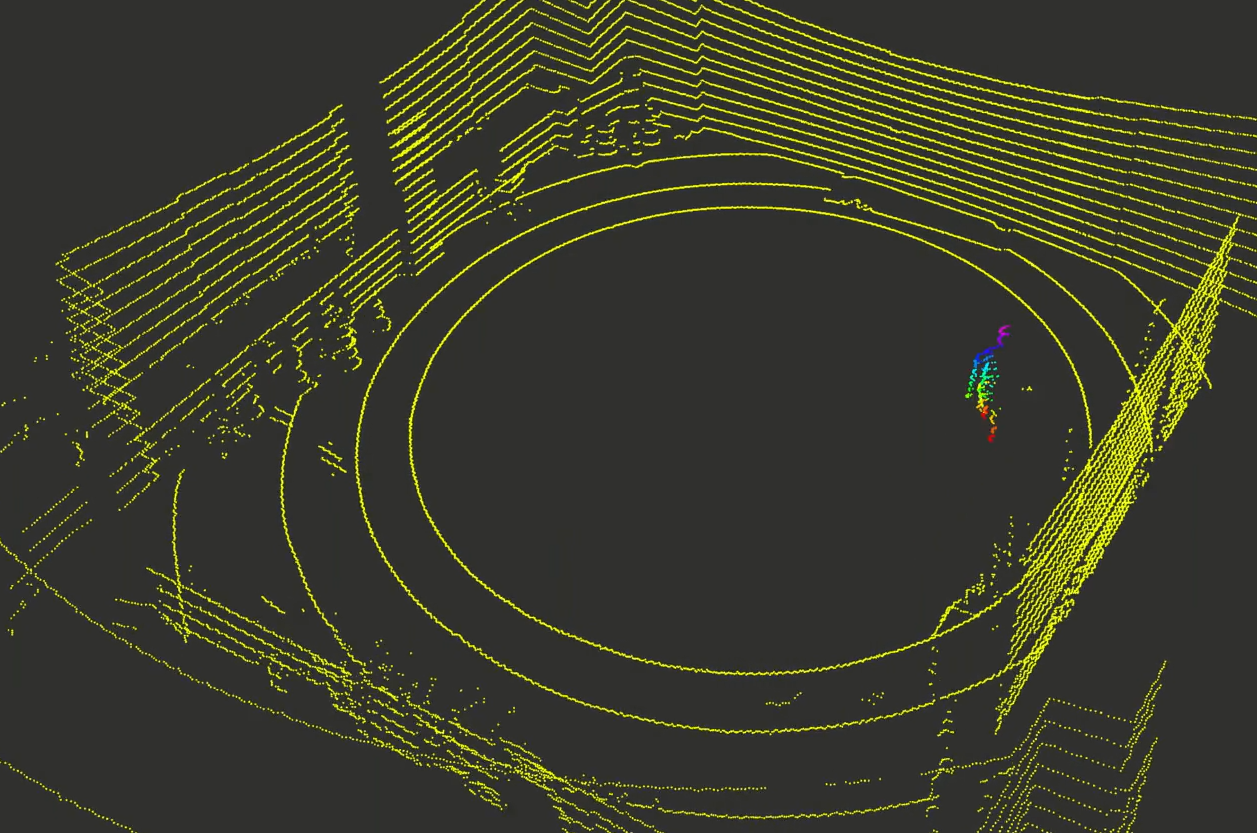
Labeling Strategy
The labeling work was performed by our automatically annotation algorithm which mainly focusing on pedestrian labeling.